MAY 2021
Plate Solving with a handset controlled ‘goto’ telescope mount – imaging M81
[This is just one of many articles in the author’s Astronomy Digest.]
The digest article “Star Hopping with a ‘goto’ telescope mount – M87 and Markarian’s Chain” describes an excellent method of finding faint objects – which, assuming the mount is horizontal and well aligned on the North Celestial Pole – will nearly always locate a faint object given that there is a reasonably close bright star in the handset’s catalogue. But, should this fail, the problem can be solved using the plate solving technique. [For this example, the ‘star hopping’ method would have worked perfectly using Dubhe as the nearby star, but I wanted to try out the plate solving method.]
Given a star field image, a plate solving program will aimto find, in its simplest form, the centre of the image in Right Ascension (RA)and Declination (Dec). This can thentell you how far away from the desired object the mount is pointing and willallow you to adjust the telescope’ pointing by an appropriate amount anddirection in RA and Dec. [In computercontrolled mounts, this may be done automatically.]
I every case one first obtains an image of the starfield – which will hopefully be close to the target object, M81. (Often called by its discoverer, Bode’s Galaxy.) It was produced using the ‘Live Stacking’ feature in SharpCap to give the result below.

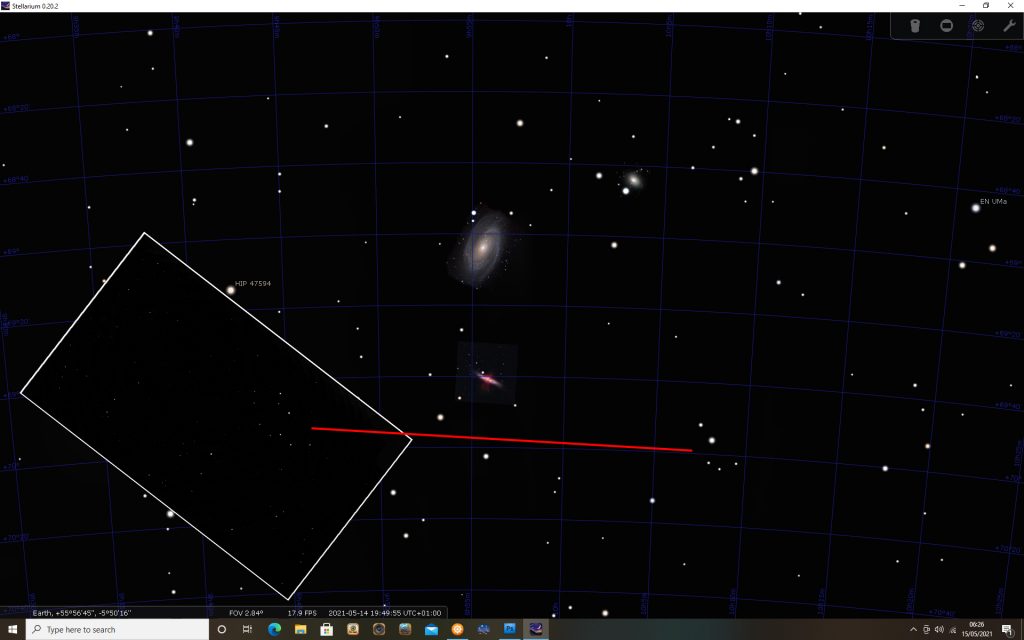
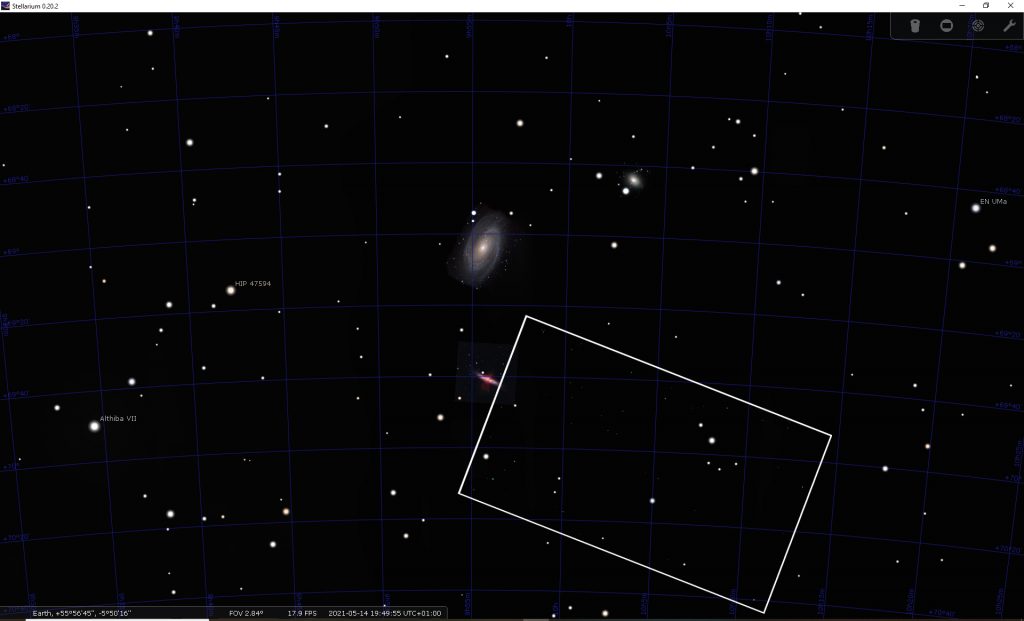
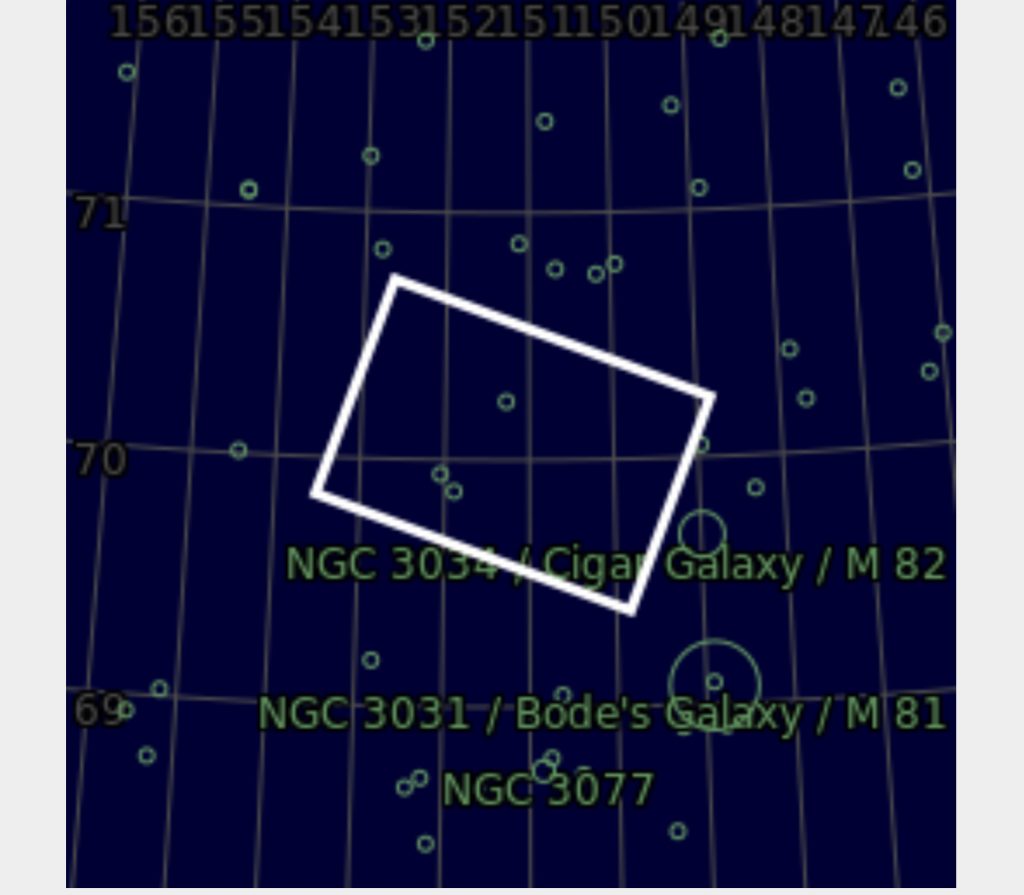
Given this image there are then three possibilities. It can be possible to platesolve by eye; matching the image with the area of sky surrounding the object as viewed in a planetarium program such as Stellarium. This is particularly true if there is an obvious pattern of bright stars in the image as there was in this case. The composite images below show a star pattern, seen in the captured image, not far away from M81 in Stellarium. This will show in which direction to move the mount – in this case reducing the Declination by about 1 degree.
If this is not possible, one can either use a plate solving program such as PlateSolve2 and star database in the imaging laptop (as well might be needed when imaging from a dark sky location) or, if the laptop is linked to the internet by wifi or ethernet, one can use the superb plate solving tool provided by Astrometry.net. Should direct access to Astrometry.net from the imaging laptop not be possible, it may be possible to save the image on an USB stick and transfer to a desktop PC to access the program.
Using Astrometry.net
Searching for ‘Astrometry.net upload’ brings up the pagebelow.
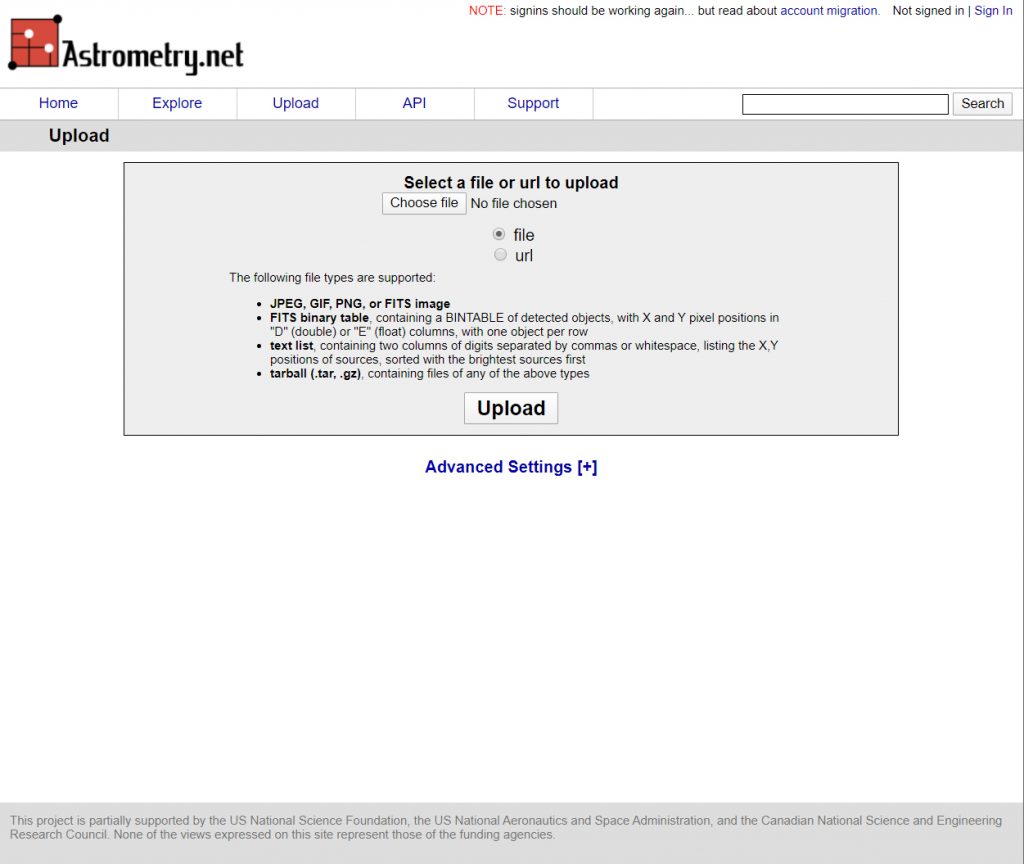
One selects the image and clicks on the ‘Upload’ tab. The screen below appears.
Once the image has been plate solved the following screenappears. This took less than 1 minute.
Going to the results page gives the plate solved result.
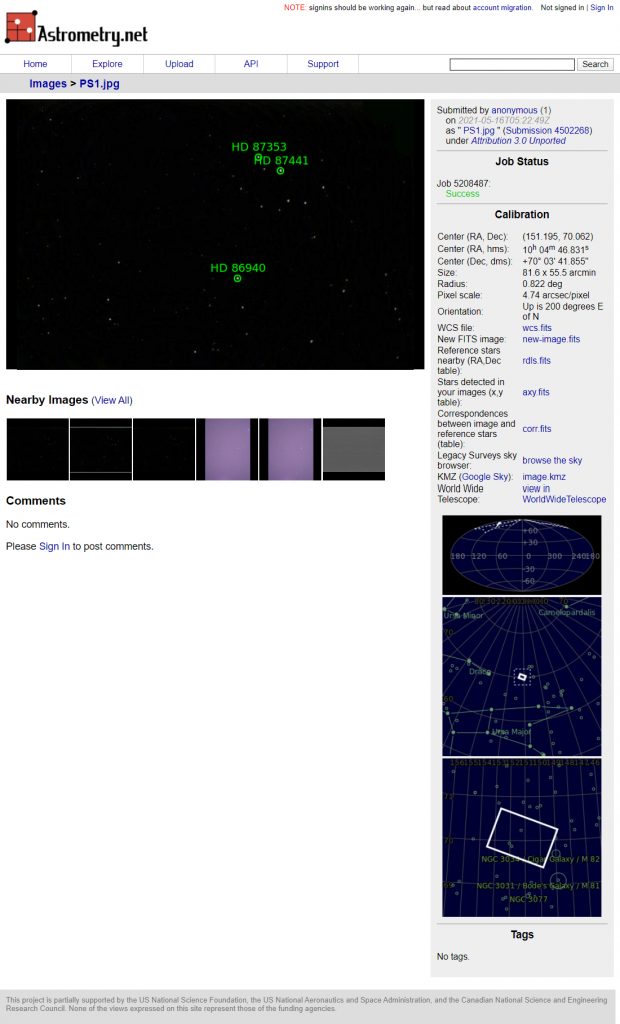
Amazingly, the program does not need to know where the telescope was pointing nor the image scale (based on the camera sensor size and telescope focal length). Having plate solved the image it provides a wealth of detail about it as seen in the screen shots below.
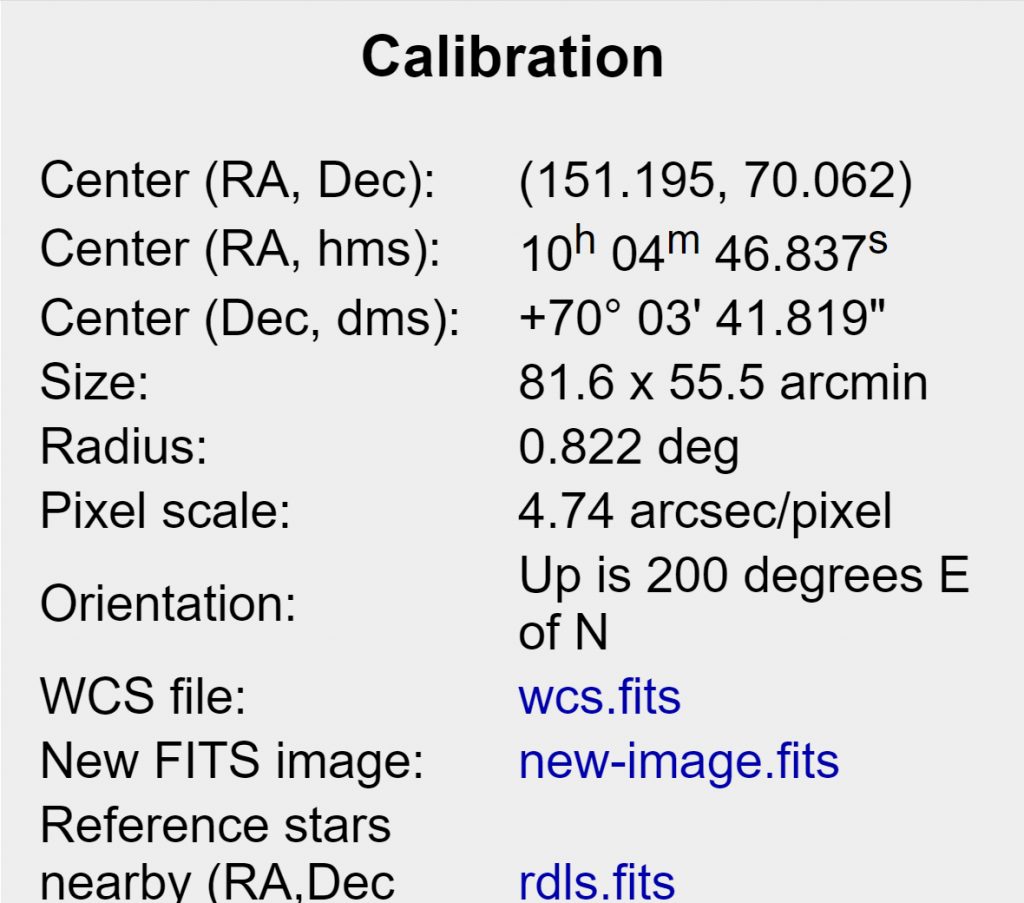
Given the RA and Dec of the image centre one can calculate the amount the mount’s pointing needs to be adjusted. In this case the error in RA was virtually zero and that in Dec just 1 degree. The mount had got quite close to the desired position! One factor that determines how accurate the initial goto will be is how well the telescope has been aligned in the ‘home position’. This 1 degree error was that achieved without any star alignment – not bad, but one should obviously carry out one first. I will simply ‘goto’ a nearby bright star from the handset’s catalogue, centre it in the field of view and then ‘sync’ to target so effectively carrying out a ‘one star’ align – but, importantly, in the region of sky where the desired object is located.
Using PlateSolve2
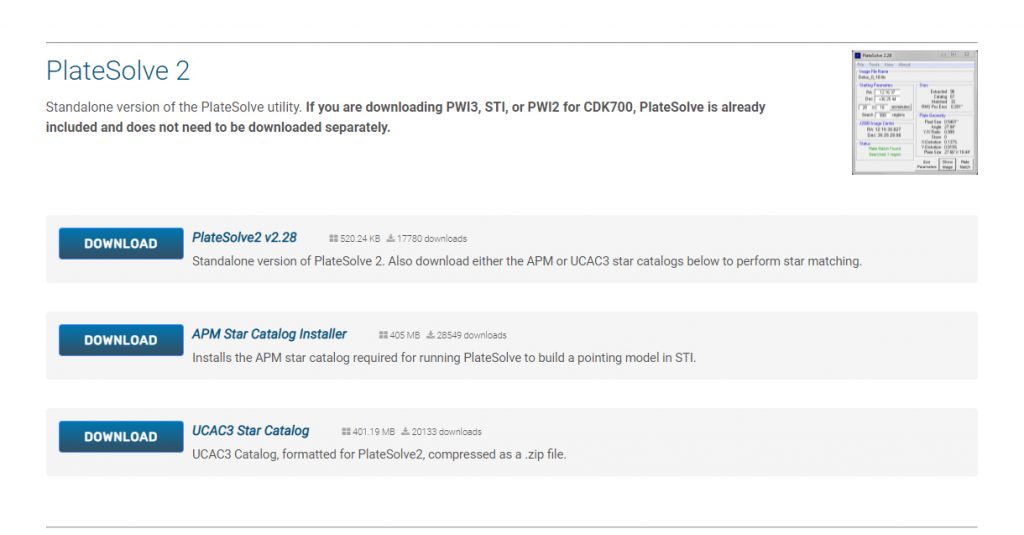
To run this program in the imaging laptop, one firstdownloads and installs it on the computer. One then needs to install the database of stars that will be used tomatch the captured image. I chose todownload the UCAC3 star catalogue.
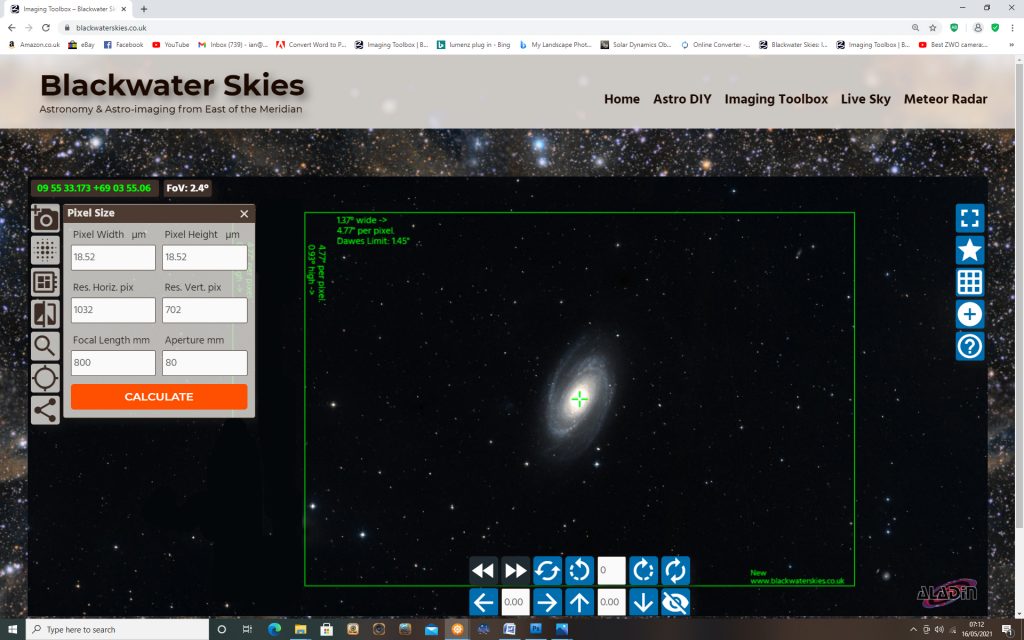
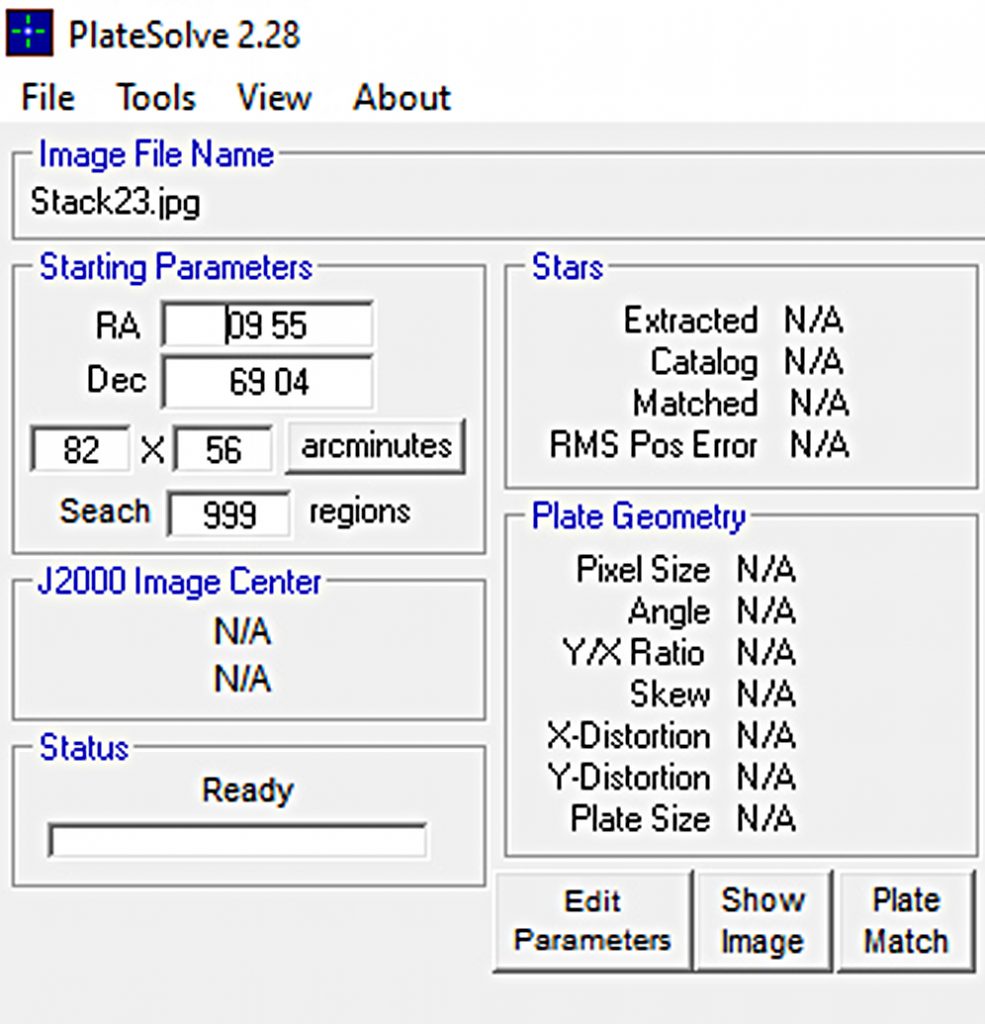
Without a very powerful computer that I suspect must be used with Astrometry.net, plate solving needs some help. Firstly the approximate RA and Dec of the image must be given – normally the RA and Dec of the target object (which in this case was M81) but also the size in arc minutes of the captured image which is determined by the combination of the camera’s sensor size and telescope focal length. For this example, an Altair Astro 294c colour camera having a Micro 4/3 sensor was coupled to an 800 mm focal length telescope. Using x4 binning to give an effective pixel size of 18.52 microns and sensor size of 1032 x 702 pixels, the field of view can be found by using a Field of View Calculator such as that provided by Blackwater Skies. The image below shows the field of view given by the camera and telescope. The calculated field size of 1.37 x 0.93 degrees (82.2 x 55.8 arc minutes) agrees very closely with that derived by Astrometry.net.
The image to be platesolved is given to the program alongwith the RA and Dec of the object and the image size in arc minutes.
When clicking on the Plate Match tab, the program carries out a spiral search and, in just a few seconds, gave the result. An image showing the matched stars can also be displayed.
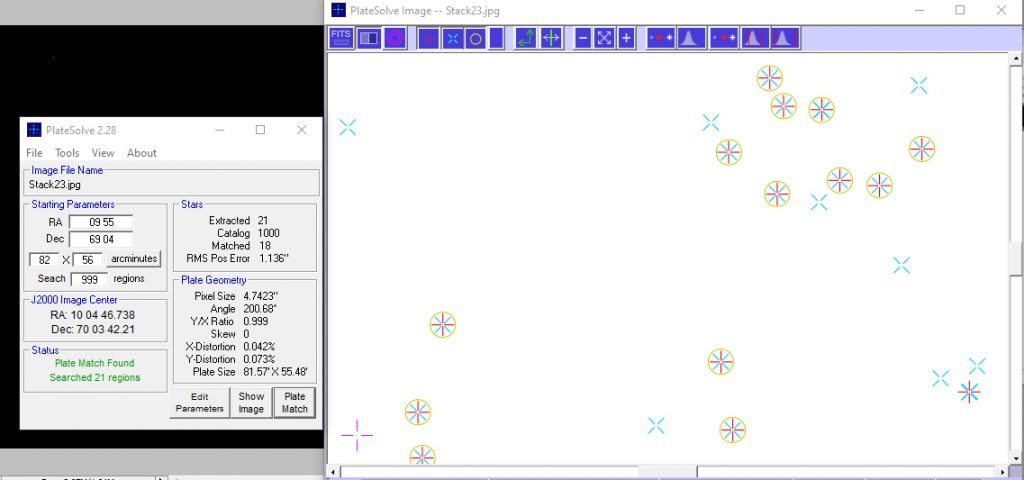
The key result is, of course, the RA and Dec of the image centre which allows a manual correction to be made to the mount’s position and so bring the desired object into view.
Calculating thedesired RA and Dec to move set mount’s pointing.
The mount’s displayed RA and Dec will be that of the desiredobject. It needs to be adjusted byamounts determined by the differences in magnitude and sign between thesevalues and those given by the platesolve program. As hours and minutes (for RA) and degrees andminutes (for Dec) are the given values for these it is not that easy to workout the required RA and Dec that the mount needs to be moved to in order to bringthe desired object into the centre of the frame.
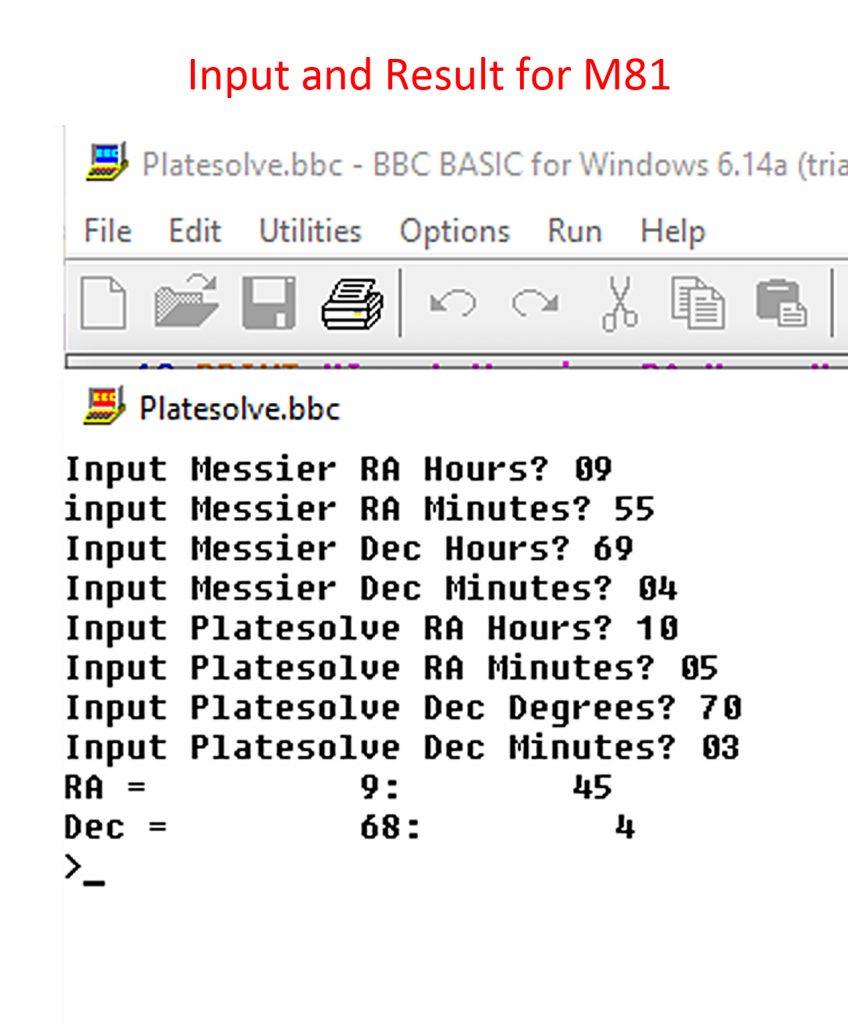
To solve this problem, I have written a short program in BBCBasic that runs on the free program ‘BBC Basic for Windows’ written byR.T.Russell:
https://www.bbcbasic.co.uk/products.html
When the emulator is opened up, the following program istyped in and saved. [ The program couldbe made more sophisticated, but then would have far more lines of code.]
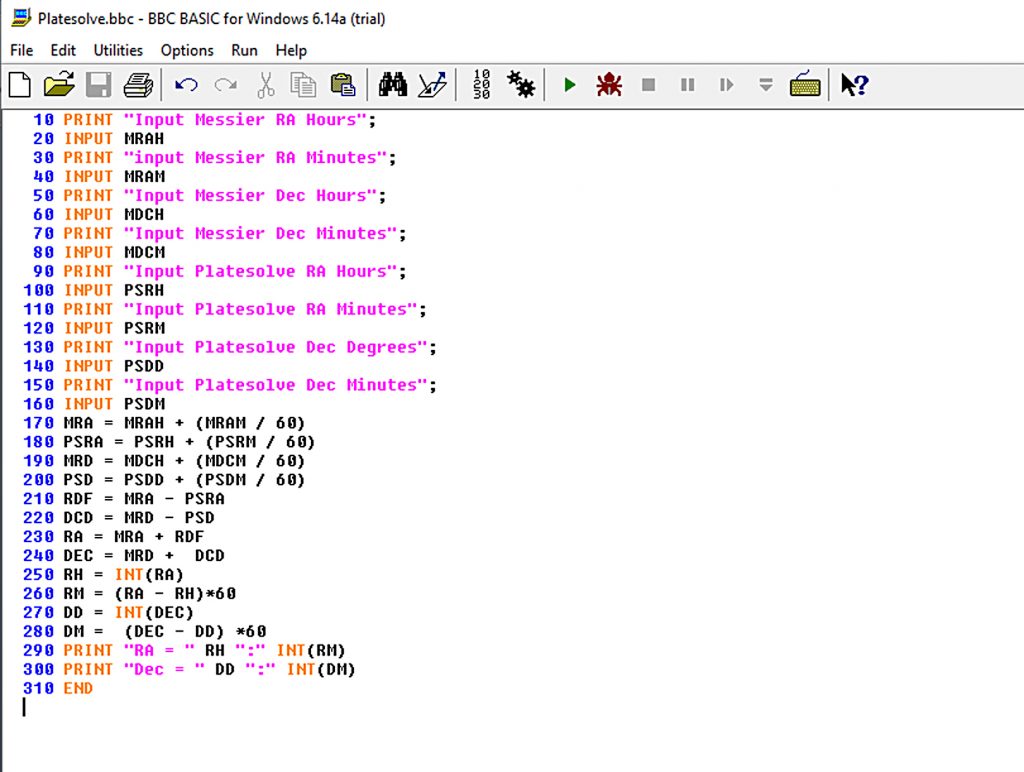
Here is the program so you could copy and paste into the BBC Basic program.
10 PRINT “Input Messier RA Hours”;
20 INPUT MRAH
30 PRINT “Input Messier RA Minutes”;
40 INPUT MRAM
50 PRINT “Input Messier Dec Degrees”;
60 INPUT MDCH
70 PRINT “Input Messier Dec Minutes”;
80 INPUT MDCM
90 PRINT “Input Platesolve RA Hours”;
100 INPUT PSRH
110 PRINT “Input Platesolve RA Minutes”;
120 INPUT PSRM
130 PRINT “Input Platesolve Dec Degrees”;
140 INPUT PSDD
150 PRINT “Input Platesolve Dec Minutes”;
160 INPUT PSDM
170 MRA = MRAH +(MRAM/60)
180 PSRA = PSRH +(PSRM/60)
190 MRD = MDCH + (MDCM/60)
200 PSD = PSDD + (PSDM/60)
210 RDF = MRA-PSRA
220 DCD = MRD – PSD
230 RA = MRA + RDF
240 DEC = MRD + DCD
250 RH = INT(RA)
260 RM = (RA-RH)*60
270 DD = INT(DEC)
280 DM = (DEC – DD) * 60
290 PRINT “RA = ” RH “:” INT(RM)
300 PRINT “Dec = ” DD “:” INT (DM)
310 END
When ‘run’ the RA and Dec of the Messier and Platesolve coordinates are typed in – each value followed by ‘enter’. The program then displays the RA and Dec that the mount must be moved to; adjusting the displayed values using the slew controls. When these are correct, the mount should be pointing at the desired object and a ‘synchronise to target’ command made. The mount’s RA and Dec will now (correctly) give the objects RA and Dec coordinates.